Основные сведения
При классификации переходных процессов, различают волновые процессы, электромагнитные и электромеханические. Здесь рассмотрены два последних вида переходных процессов.
Из общих уравнений Парка — Горева, изложенных ниже, могут быть найдены значения токов при любых переходных процессах в системах, в том числе при коротких замыканиях, однако в этом разделе не приводятся расчетные выражения для определения этих токов.
Расчеты по уравнениям Парка — Горева (П.-Г.) довольно сложны и проводятся только при применении вычислительных машин. Обычно при аналитических расчетах, расчетах с помощью статических моделей (расчетных столов) и значительной части расчетов, выполняемых на вычислительных машинах, целесообразно пользоваться упрощенными уравнениями. Правильный выбор системы уравнений и необходимой точности анализа, соответствующей реальной технической задаче, составляет искусство инженера.
Дифференциальные уравнения синхронных машин дают возможность проводить анализ переходных процессов в электрических системах с учетом наибольшего количества влияющих факторов (изменений угловой скорости ротора, апериодических составляющих токов статора, периодических токов ротора, активного сопротивления в цепи статора генератора). Опустив те или иные члены в уравнениях П. — Г., можно получить упрощенные уравнения, применяющиеся: а) для расчетов токов коротких замыканий (без учета изменений скорости); б) для расчета электромеханических переходных процессов, обычно без учета апериодических составляющих тока, статора и периодических тока ротора.
Уравнения П. — Г. связывают мгновенные значения токов, магнитных потоков, напряжений в осях координат (d, q), жестко связанных с ротором.
Мгновенные значения параметров режима — фазные и в осях d, q
Эти значения определяют как проекции на оси времени фаз а, b, с вектора тока, вращающегося со скоростью w. Этот вектор тока (напряжения, э. д. с, потокосцепления) называют обобщенным.
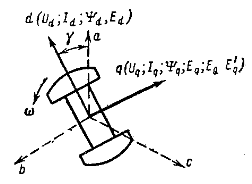
Оси времени ![]() фаз, а, b, с неподвижны и совпадают с осями обмоток статора (рис. 37-1):
фаз, а, b, с неподвижны и совпадают с осями обмоток статора (рис. 37-1):
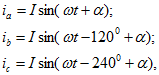
где a — произвольный угол.
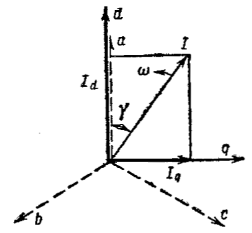
Проекции обобщенного вектора тока на оси d и q, жестко связанные с ротором, дают значения, продольного и поперечного токов (рис. 37-2):
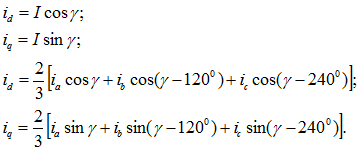
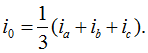
При наличии токов нулевой последовательности в системе имеет место соотношение
Соотношения, аналогичные приведенным выше, справедливы для напряжений, э. д. с. и потокосцеплений.
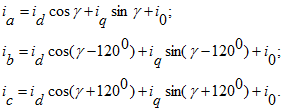
Соотношения между мгновенными значениями фазных величин и величинами в продольной и поперечной осях имеют вид:
Угол g меняется во времени:
![]()
где ![]() — полное потокосцепление статора в продольной оси;
— полное потокосцепление статора в продольной оси; ![]() — то же в поперечной оси;
— то же в поперечной оси; ![]() — ток нулевой последовательности.
— ток нулевой последовательности.
В случае симметричного режима системы токи нулевой последовательности отсутствуют ![]() и выражения упрощаются.
и выражения упрощаются.
Значения ![]() и
и ![]() определяются из выражений:
определяются из выражений:
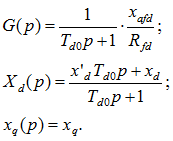
![]()
где G(p)-операторная проводимость машины; Xd(p)-операторное сопротивление машины в продольной оси; Xq(p)-то же в поперечной оси; UB — напряжения возбуждения машины.
Для машины без успокоительных обмоток и эквивалентных им контуров
Если известна э. д. с. Eq, по ![]() можно найти так:
можно найти так:
![]()
Для машины с успокоительными обмотками в продольной и поперечной осях ![]() и
и ![]() определяются теми же уравнениями.
определяются теми же уравнениями.
Рис.37-1
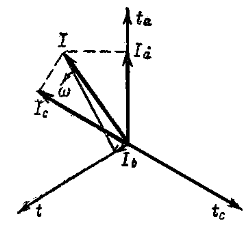
Рис. 37-2. Положение обобщенного вектора тока I в пространстве и его проекции на продольную и поперечную оси ротора.
Уравнения Парка — Горева для синхронной машины в операторной форме
Эти уравнения при принятых на рис. 37-3 направлениях осей имеют вид: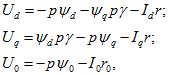
где
![]()
В системе относительных единиц ![]() ; тогда
; тогда ![]() .
.
Рис. 37-3
Третье уравнение системы относится к случаю несимметричного режима или несимметричной схемы.
Уравнения, приведенные выше, полностью описывают переходный процесс машины, работающей на шины неизменного напряжения. Для анализа переходного процесса в сложной системе уравнения составляются для каждого элемента (генераторов, нагрузок, участков сети) и решаются совместно.
Решение уравнений, описывающих переходный процесс в системе
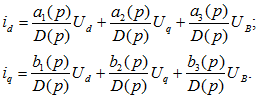
Решение приведенной выше системы уравнений относительно токов или других величин, рассматриваемых как неизвестные, проводится в операторной форме (для изображений). Например, находятся значения токов в виде:
![]()
где D1(p), D2(p)-частные определители системы; D(p)-общий определитель системы.
Характер переходного процесса в системе определяется знаком вещественной части корней определителя D(p). При ![]() переходный процесс затухающий.
переходный процесс затухающий.
Если изменения напряжений ![]() заданы, то можно записать:
заданы, то можно записать:
Токи как функции времени находят, переходя от изображения к оригиналам, что может быть сделано с помощью формулы разложения.
Уравнения для вращающего момента и мощности во время относительного движения ротора
При принятых направлениях осей (рис. 37-3) момент электромагнитных сил, действующих на ротор, в общем случае имеет вид
![]()
При подстановке ![]() и
и ![]() выраженных через токи и реактивные сопротивления, электромагнитный момент может быть вычислен согласно
выраженных через токи и реактивные сопротивления, электромагнитный момент может быть вычислен согласно
![]()
В системе относительных единиц, где коэффициент 3/2 учтен соответствующим выбором базисных величин,
![]()
Связь между мощностью, отдаваемой в сеть, и моментом следующая:
![]()
где ![]() в относительных единицах;
в относительных единицах;
![]()
Электромагнитная мощность генератора, передаваемая с ротора на статор,
![]()
Уравнение относительного движения ротора в общем виде:
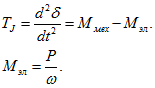
В относительных единицах
![]()
Упрощенные уравнения Парка — Горева для определения параметров режима при переходных электромеханических процессах
Эти уравнения применяются при расчетах токов коротких замыканий, устойчивости и т. д. При этом отказываются от учета влияния:
1) апериодической составляющей тока статора (трансформаторной э. д. с);
2) периодических токов ротора, связанных с апериодическими составляющими тока статора;
3) активного сопротивления в цепи статора.
Тогда в системе относительных единиц при ![]() уравнения П.- Г. для синхронной машины будут иметь вид:
уравнения П.- Г. для синхронной машины будут иметь вид:
![]()
В соответствии с этим упрощаются выражения для токов: ![]()
Выражения мощности и электромагнитного момента в этих условиях будут совпадать, так как при принятых предпосылках отдаваемая мощность численно равна вращающему моменту. Для симметричного или условно приведенного к симметричному режима (метод симметричных составляющих) получим:
![]()
Здесь ![]() и
и ![]() берутся с учетом принятых допущений.
берутся с учетом принятых допущений.
Уравнение относительного движения ротора при принятых допущениях имеет вид
![]()
На основе упрощенного выражения момента можно перейти к ряду частных его выражений.